
IT개발도상국
(2)물류 이동 로봇(주행 로봇 이동 원리) 본문
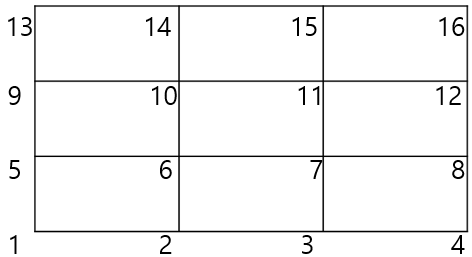
아래와 그림과 같이 라인이 그려진 평면에 교차로에 값을 입력한 값에 따라 자율적으로 움직이는 주행 로봇을 개발한다.
동작 원리는 X축,Y축을 인식하여 교차로 마다 -,+ 계산을 통해 동작한다.
ex: 즉 1에서 시작한다고 하면 좌표값이 (1,0)이다. 이 때 입력값을 7을 주었을 때 7-4의 값은 목 1 나머지 3이기에 (3,1)만큼 이동한다. x축으로 3-1하여 교차로 2개를 지나가고 y축으로 0-1을 하여 교차로 1개를 지나 7의 자리에 도달하게 된다.
주의사항: x,y축 이동을 끝나고 나서 항상 x축 +방향으로 있어야 정상적으로 동작할 수 있다. 만약 x축 - 방향 또는 y축 방향일 경우에는 오동작을 하게 된다. 알고리즘이 x축 + 방향으로 기준이 잡혀있기 때문이다.
'대학교 프로젝트 > 주율 주행 로봇 개발' 카테고리의 다른 글
| (3)물류 이동 로봇(소프트웨어 구현) (0) | 2023.02.28 |
|---|---|
| (1)물류 로봇 개발 기획 (주행 부분 개발)(팀장) (0) | 2023.02.28 |
'대학교 프로젝트/주율 주행 로봇 개발' Related Articles
more

Comments